5.
External Transport System
DaedalusaL4 will require external
transportation for three main purposes. Firstly, materials and people will
have to be launched from the surface of Earth, achieve orbit and be transferred
to the settlement. Secondly, for DL4 to fulfil its mining and satellite production
capabilities, transfer of materials and crew must be available between the settlement
and Earth and Solar orbits. Finally, minerals must be transferred from lunar
and asteroid mining facilities to the station. Such transportation must be
catered for economically, safely, and, since space travel will become part of
daily life, easily.
5.1 Earth to Low Earth
Orbit and Beyond
During construction of DaedalusaL4
in low Earth orbit a large amount of material and equipment will be required
from the Earth. These materials have been kept to a minimum and have been designed
to be as low in mass a possible. However, as DL4 will be one of the first settlements
of its kind, the first stages of fabrication must unfortunately be terrestrially
based (see 3 Construction). Additionally, as we are basing the settlement on
reasonable extrapolations of current technology, the transport mechanism during
this fledgling period must also be achievable in the near-term. Hence, at least
in this stage of DL4’s life chemical rocketry is required.
 In
order to reduce costs wherever possible, the best rockets are obviously reusable
ones. Out of many bright ideas to achieve this two current methods, that will
undoubtedly multiply in the near future, seem to stand out. These are the Roton
Rotary Rocket and the Kistler Reusable Rocket. The single stage Roton Rocket
takes off vertically while its 7m diameter engine, consisting of 96 combustion
chambers into which oxidiser and fuel are fed, spins at 720rpm providing sufficient
centrifugal force for combustion pressure.
In
order to reduce costs wherever possible, the best rockets are obviously reusable
ones. Out of many bright ideas to achieve this two current methods, that will
undoubtedly multiply in the near future, seem to stand out. These are the Roton
Rotary Rocket and the Kistler Reusable Rocket. The single stage Roton Rocket
takes off vertically while its 7m diameter engine, consisting of 96 combustion
chambers into which oxidiser and fuel are fed, spins at 720rpm providing sufficient
centrifugal force for combustion pressure. 
Having reached and deployed its payload
in low Earth orbit it then enters the atmosphere base first while deploying
helicopter blades. These blades, passively spinning at first then later actively
thanks to tiny rockets, allow a steady decent rate for the vehicle while it
is stabilised by side thrusters (ref.
92). The second choice is the more plausible for heavier payloads.
The Kistler Reusable Rocket is a two stage vehicle using kerosene and liquid
oxygen Russian engines. After lift off, using three NK-33 engines the first
stage separates and returns to the launch site on parachutes. Meanwhile the
second stage’s motors fire, carrying it to the deployment orbit. Here, after
releasing its payload, the vehicle pitches and re-enters the atmosphere nose
first. It then lands slowly, thanks to parachutes, and softly, thanks to airbags
(ref. 94). It
was considered that these vehicles could additionally carry the construction
crews to orbit, however a purpose built astronaut carrier would better ensure
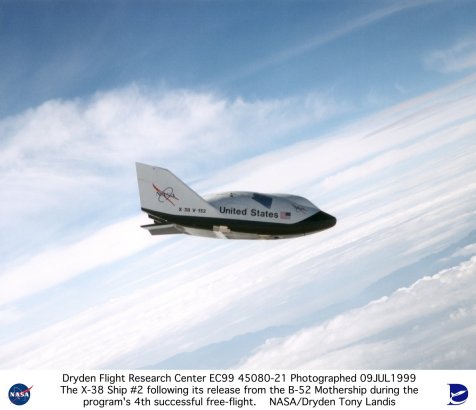
suitable crew transport at this stage of DaedalusaL4’s life. While other concepts like the X-34, a crew version
of the X-33 model utilising a linear aerospike engine that automatically adjusts
to changing atmospheric pressure (ref.
93), are still on the drawing board we would suggest the use of a modified
X-38. While this vehicle is only being designed for nine hours autonomous life
support as a four person crew return vehicle, slight modifications could enable
it to carry seven people for longer periods and allow it to function as a launch
vehicle. Such a launch capability would probably be achieved thanks to a co-operative
effort, where an X-38 would be strapped to an Ariane 5 booster for launch to
Earth orbit (ref. 70).
stage of DaedalusaL4’s life. While other concepts like the X-34, a crew version
of the X-33 model utilising a linear aerospike engine that automatically adjusts
to changing atmospheric pressure (ref.
93), are still on the drawing board we would suggest the use of a modified
X-38. While this vehicle is only being designed for nine hours autonomous life
support as a four person crew return vehicle, slight modifications could enable
it to carry seven people for longer periods and allow it to function as a launch
vehicle. Such a launch capability would probably be achieved thanks to a co-operative
effort, where an X-38 would be strapped to an Ariane 5 booster for launch to
Earth orbit (ref. 70).
Once construction is complete in
low Earth orbit, the settlement’s central sphere and mirror must be transferred
to the Lagrange libration point 4. This will be achieved, most likely, by using
a solar sail for the mirror and a system of tethers for the central sphere.
The solar sail will be of reflective configuration, providing greater thrust
over its heat producing, light absorbing counterpart. Either using a low aperture
space-based laser or photons from the sun, a solar sail generates thrust when
light bounces off the sail (ref.
69). This small acceleration is proportional to the force transmitted
and unfortunately inversely proportional to the payload’s mass. However, as
the mirror will have been constructed of paper-thin sodium foils, and not yet
have received its jacket of PV cells, its mass should still be reasonably low
allowing for its transfer in this manner. The space tether infrastructure suggested
for use in transferring the sphere to L4 is detailed later. Despite the hopefully
successful movement and final construction of the settlement it will still be
missing one final, vital element – people.
 The
use of the X-38 for all passenger services would be extremely costly, given
a required passenger list in excess of 8,000 (initial population), and the range
required of a craft to effectively reach lunar orbit. Therefore, as we would
hope that, by this stage of DL4 ‘normalising’, significant advances in space
plane technology would have taken place, a ramjet/rocket engine space plane
was chosen as our main passenger transport. This system (under development
by Space Access amongst others) involves the acceleration of the multiple stage
vehicle to Mach 6 on air breathing engines before switching to chemical rocketry
for the last leap out of the atmosphere. Once in orbit smaller stages are released
from the first deploying the payload and eventually flying back to the launch
strip along with the first stage. The system offers the advantages of horizontal
takeoff as well as total reusability. While it does not escape the need for
carried oxygen, this being required for the final burst, the current designs
for a vehicle that can accelerate beyond escape velocity using only atmospheric
oxidiser – a scramjet – were ruled out. Once the domain of the scramjet is
entered, the air no longer needs to be compressed before combustion as this
is catered for by the velocity of the craft (above Mach 6 = six times the speed
of sound). However this is difficult to achieve as the air must additionally
be slowed in order to allow time to fully burn the propellants. Hence an extremely
aerodynamic craft, that slows the incoming air and compresses it without overheating,
is required and this was considered too long-term and finely balanced for the
large number of people (not to mention their possessions) needing to be shipped
to DL4. However, should these engines become a tested reality before DaedalusaL4
then they would most certainly be reconsidered for ferrying services. Meanwhile
the ejector ramjet, used by the space plane, works on a system where air entering
the engine is initially compressed before mixing with the fuel, where it is
burnt to produce expanding combustion products and generate thrust.
The
use of the X-38 for all passenger services would be extremely costly, given
a required passenger list in excess of 8,000 (initial population), and the range
required of a craft to effectively reach lunar orbit. Therefore, as we would
hope that, by this stage of DL4 ‘normalising’, significant advances in space
plane technology would have taken place, a ramjet/rocket engine space plane
was chosen as our main passenger transport. This system (under development
by Space Access amongst others) involves the acceleration of the multiple stage
vehicle to Mach 6 on air breathing engines before switching to chemical rocketry
for the last leap out of the atmosphere. Once in orbit smaller stages are released
from the first deploying the payload and eventually flying back to the launch
strip along with the first stage. The system offers the advantages of horizontal
takeoff as well as total reusability. While it does not escape the need for
carried oxygen, this being required for the final burst, the current designs
for a vehicle that can accelerate beyond escape velocity using only atmospheric
oxidiser – a scramjet – were ruled out. Once the domain of the scramjet is
entered, the air no longer needs to be compressed before combustion as this
is catered for by the velocity of the craft (above Mach 6 = six times the speed
of sound). However this is difficult to achieve as the air must additionally
be slowed in order to allow time to fully burn the propellants. Hence an extremely
aerodynamic craft, that slows the incoming air and compresses it without overheating,
is required and this was considered too long-term and finely balanced for the
large number of people (not to mention their possessions) needing to be shipped
to DL4. However, should these engines become a tested reality before DaedalusaL4
then they would most certainly be reconsidered for ferrying services. Meanwhile
the ejector ramjet, used by the space plane, works on a system where air entering
the engine is initially compressed before mixing with the fuel, where it is
burnt to produce expanding combustion products and generate thrust.
 While
it is plausible that the second stages of a space plane could travel to the
L4 libration point, as this is where residents must be delivered, this would
reduce the amount of ‘cabin’ area available due to the increased space required
for propellants. Therefore, it is suggested that, during construction of the
sphere and deployment of the mirror in low Earth orbit, a space tether infrastructure
be laid down. Tethers would consist of multiple microscopic fibres made of
carbon atoms assembled into ‘buckytubes’ just a few nanometres thick. Once
grown into long intertwined and threaded ropes these will hopefully create tethers
600 times stronger than current materials can provide. Once in orbit these
operate on the principle that objects farther from the Earth’s centre must maintain
slightly slower horizontal velocities than closer objects. Hence, when a tether,
more than a few hundred kilometres long, connects two objects in different orbits
the tether is kept in tension. Then, using the conservation of angular momentum,
the tether can be used as a giant slingshot to transfer momentum between bodies
and swing satellites to different orbits. This power can even be supplemented
by designing the tether out of conductive materials that then interact with
the Earth’s magnetic field to generate electricity and contribute lift. Meanwhile
the tether’s own orbit, affected slightly by the transfer of momentum, may be
maintained by solar produced electricity running through the rope and pushing
against the Earth’s magnetic field. The suggested system for DaedalusaL4 involves
the provision of two principle tethers, one in low Earth orbit (LEO) and the
other in a high Earth elliptical orbit (HEO). The LEO tether would pick up
the payload, in this case one of the passenger carrying smaller stages of the
space plane or the central sphere, and orbit round the Earth. The cartwheeling
tether, once in line with the HEO tether, would transfer the payload to the
second tether. This would then, once in a suitable position, slingshot the
payload towards L4 (ref.
69, 95), where once within suitable range of the libration point, the
passenger carrier or central sphere could initialise electric engines, such
as Hall thrusters, to decelerate and bring it safely to the required position (see fig. 5.1e).
While
it is plausible that the second stages of a space plane could travel to the
L4 libration point, as this is where residents must be delivered, this would
reduce the amount of ‘cabin’ area available due to the increased space required
for propellants. Therefore, it is suggested that, during construction of the
sphere and deployment of the mirror in low Earth orbit, a space tether infrastructure
be laid down. Tethers would consist of multiple microscopic fibres made of
carbon atoms assembled into ‘buckytubes’ just a few nanometres thick. Once
grown into long intertwined and threaded ropes these will hopefully create tethers
600 times stronger than current materials can provide. Once in orbit these
operate on the principle that objects farther from the Earth’s centre must maintain
slightly slower horizontal velocities than closer objects. Hence, when a tether,
more than a few hundred kilometres long, connects two objects in different orbits
the tether is kept in tension. Then, using the conservation of angular momentum,
the tether can be used as a giant slingshot to transfer momentum between bodies
and swing satellites to different orbits. This power can even be supplemented
by designing the tether out of conductive materials that then interact with
the Earth’s magnetic field to generate electricity and contribute lift. Meanwhile
the tether’s own orbit, affected slightly by the transfer of momentum, may be
maintained by solar produced electricity running through the rope and pushing
against the Earth’s magnetic field. The suggested system for DaedalusaL4 involves
the provision of two principle tethers, one in low Earth orbit (LEO) and the
other in a high Earth elliptical orbit (HEO). The LEO tether would pick up
the payload, in this case one of the passenger carrying smaller stages of the
space plane or the central sphere, and orbit round the Earth. The cartwheeling
tether, once in line with the HEO tether, would transfer the payload to the
second tether. This would then, once in a suitable position, slingshot the
payload towards L4 (ref.
69, 95), where once within suitable range of the libration point, the
passenger carrier or central sphere could initialise electric engines, such
as Hall thrusters, to decelerate and bring it safely to the required position (see fig. 5.1e).
At the time of DaedalusaL4’s construction
it is assumed that no major orbita l
solar-power stations will be in operation. Hence during low Earth orbit construction,
the use of magnetohydrodynamic thrust lightcraft was ruled out. However when
certain terrestrial materials during DL4’s lifetime are required the use of
such lightcraft for the initial stage of transport is a definite possibility
as it would use the infrastructure that the settlement had put in place and
hence reduce launch costs. The system works on the basis of microwave power
beamed to an ascending lightcraft from an orbital solar-power station. The
microwave beam is focused by the vehicle’s body to produce an air spike, culminating
in a point of explosively heated air. This deflects air from the front of the
craft forcing it round in a shock wave. As the deflected air reaches the rim
of the vehicle it encounters electrodes which ionise the air and generate thrust.
Once the lightcraft reaches a certain altitude the vehicle would unfortunately
have to supply, from a stored supply, hydrogen to replace the thinning atmosphere.
However, by using atmospheric propellants and beamed power for the majority
of the journey, the system still reduces the amount of propellants required
significantly, and once in low Earth orbit could be transferred to the tether
infrastructure for its continued voyage to DL4.
l
solar-power stations will be in operation. Hence during low Earth orbit construction,
the use of magnetohydrodynamic thrust lightcraft was ruled out. However when
certain terrestrial materials during DL4’s lifetime are required the use of
such lightcraft for the initial stage of transport is a definite possibility
as it would use the infrastructure that the settlement had put in place and
hence reduce launch costs. The system works on the basis of microwave power
beamed to an ascending lightcraft from an orbital solar-power station. The
microwave beam is focused by the vehicle’s body to produce an air spike, culminating
in a point of explosively heated air. This deflects air from the front of the
craft forcing it round in a shock wave. As the deflected air reaches the rim
of the vehicle it encounters electrodes which ionise the air and generate thrust.
Once the lightcraft reaches a certain altitude the vehicle would unfortunately
have to supply, from a stored supply, hydrogen to replace the thinning atmosphere.
However, by using atmospheric propellants and beamed power for the majority
of the journey, the system still reduces the amount of propellants required
significantly, and once in low Earth orbit could be transferred to the tether
infrastructure for its continued voyage to DL4.
 5.2
DL4 to Various Orbits
5.2
DL4 to Various Orbits
This transport will be necessary
to move satellites from DL4 to other orbits. This will be catered for through
the solar orbit transfer vehicle, which utilises a large mirror to focus solar
radiation onto graphite. Once heated to 2,100ºC this in turn vaporises stored
liquid hydrogen propellant to generate thrust which can then gently adjust the
orbit of satellites, transferring between low Earth orbit and Geosynchronous
orbit in eight weeks (ref.
96). Around DL4 this system can be supplemented with Hall thrusters.
Like ion drives these generate ions, however radial magnetic fields (produced
by the Hall effect[1]) replace grids to accelerate the
ions. This set-up leads to an increased impulse that is attractive for near-Earth
transport where fast changes of velocity may be required. Another system can
be implemented for mini- and micro-satellites. Using microwave power to heat
a propellant, an extremely energy-efficient thruster can be designed. This
can produce three to five times as much thrust as an ion drive on the same power
levels. It offers the additional advantage that practically any propellant
can be used, whereas ion drives are restricted to a limited range of substances.
Unfortunately these systems can only
cope with the transfer of satellites and unless incorporated into special craft
designs will not be suitable for crew transfers to other stations or satellites.
Hence, it is expected that special craft will be designed for this use. Meanwhile
the X-38 seems the most plausible option requiring even fewer adjustments for
this task. However transporting crews to and from the Moon and more specifically
to and from asteroid mining sites, will definitely require specialist craft.
On the reasonably temporary mining sites of asteroids it is not expected that
there will be sufficient time to construct a significant launch pad, however
this may be possible on the Moon, enabling a suitable craft to be constructed
there, probably based on an X-38 with an appropriately designer lunar booster.
5.3 Materials from the
Moon and Asteroids to DL4
When considering the methods
by which DaedalusaL4 will be constructed, one of the most important considerations
is the transport of building materials from the Moon and asteroids to the construction
site. There are several ways in which this could be accomplished but all methods
can be divided into two main categories: rockets and projectile launchers. In
the rockets category, the main contenders are various conventional chemical
or nuclear powered rockets. The projectile launcher would either be a mass
driver or a chemical cannon.
The
concept of using chemical rockets at this stage of DL4’s life was abandoned
because of the small payload they can carry and the high operating costs. The
Moon also has sufficient levels of gravity to retain an atmosphere, and chemical
rocket launches could create a significant atmosphere if they were to persist
for any length of time.
This
leaves us with a choice between a mass driver and a chemical cannon. A chemical
cannon would be an enormous construction project even if prefabricated parts
were to be used. There are also significant logistical problems and the issue
of radiation contamination. As such the mass driver is the preferred method
of transporting materials for construction. A mass driver has several clear
advantages over other forms of transportation (ref. 59).
1.
It is a simple automatic
device to operate.
2.
It could catapult thousands
of tonnes per month whereas it would take many rockets of excessive size to
achieve this.
3.
It is cost effective
to operate and does not utilise costly or environmentally damaging fuel propellants.
Mass Driver Specification
One of the defining characteristics
of mass drivers is their length, even relatively short designs are required
to be several kilometres long. The choice of length for our mass driver was
a thorny one. An exceptionally long mass driver, say 68 kilometres requires
an acceleration of only 4.5g, whereas a shorter mass driver of 10 kilometres
needs an acceleration of approximately 30g (ref. 60). Therefore the
acceleration that materials in the mass driver can withstand must be balanced
with economical length of the mass driver and the escape velocity required to
transport masses from the Moon and asteroids to our mass catcher at L4.
The
length of a mass driver may be approximately calculated from the simple formula
below:
 ,
,
where  =
length of mass driver,
=
length of mass driver,  =
velocity of mass packet and
=
velocity of mass packet and  =
acceleration.
=
acceleration.
While
variable for our temporary asteroid mass drivers – depending on the mass and
density of the asteroid – the required escape velocity of a lunar mass driver
is related primarily to the Moon’s own escape velocity but is also affected
by the Earth’s gravitational pull.
|
lunar
escape velocity
|
2,369 m/s
|
|
correction
to escape velocity
(due to Earth’s pull
at mean distance from Moon)
|
+ 73.144 m/s
|
|
required
escape velocity
|
|
The
maximum acceleration is dependent on the types of materials to be launched from
the device and their ability to withstand high ‘g’ forces. Taking a figure of
19-20 g as acceptable a figure of roughly 16 kilometres was arrived at for the
length of the lunar mass driver. The exact figure for acceleration is 186.4
m/sec2 or 19.02g. Putting this into the length equation we get the
following result.
length of mass driver = 
length = 15,998.374 metres or 15.99 kilometres
Operation
of the Mass Driver
 The principles behind a lunar mass driver
are very straightforward. Put simply, a mass driver works by two electromagnets
attracting each other and hence causing acceleration. One coil is larger than
the other and the smaller coil passes through the centre of the larger. The
larger coil is the drive coil while the smaller coil is referred to as the bucket
coil. The mass driver consists of a tunnel of numerous drive coils accelerating
a bucket coil. Inside the bucket coil is a container or ‘bucket’ within which
the material to be catapulted is transported.
The principles behind a lunar mass driver
are very straightforward. Put simply, a mass driver works by two electromagnets
attracting each other and hence causing acceleration. One coil is larger than
the other and the smaller coil passes through the centre of the larger. The
larger coil is the drive coil while the smaller coil is referred to as the bucket
coil. The mass driver consists of a tunnel of numerous drive coils accelerating
a bucket coil. Inside the bucket coil is a container or ‘bucket’ within which
the material to be catapulted is transported.
The drive coils are not always
turned on but rather are activated in sequence as the payload travels along
the track. Each drive coil only activates when the bucket is close enough to
feel the attractive pull significantly (in order to save power) and turns off
when the bucket coil reaches the centre of the drive coil to avoid decelerating
the payload. As such, each drive coil only gets a short pulse of current while
the bucket requires a continuous current. A working prototype of such a device
was constructed and successfully tested by the Space Studies Institute (SSI).
The mass to be transported is
carried in the container along the 16 kilometre track. The bucket is accelerated
through 186.396 m/sec2 or 19 g by a linear electric motor. Following
this, the buckets then enter a section of track where all oscillations and vibrations
are reduced in amplitude enough to allow the launching of the mass with very
great precision.
During
acceleration the payload is held tightly in the bucket, however when lunar escape
velocity has been reached and any trajectory corrections have been made, the
payload will be released from the bucket and escapes the lunar surface. At this
point the bucket is magnetically decelerated and thus becomes separated from
the payload (which is not decelerated). The bucket then enters a section of
rack, where it is further decelerated by a linear synchronous motor. It is then
returned to the loading area via a parallel track.
It
is extremely important for all payloads leaving the driver to have exactly the
same velocity so that they all go to the same point in orbit and the collector
can be of reasonable size. Despite our best efforts there will, from time to
time, be some variation in trajectory and as such it is desirable to have some
means of correcting a trajectory once the package has been set in motion. Trajectory
determination can be easily achieved by means of optical laser ranging, where
striking one side of the payload with a low powered laser or particle beam brings
about trajectory correction. This would remove a thin layer of the payloads
outer surface creating an action-reaction impulse sufficient to prevent the
payload from missing the orbital catcher.
The
minerals mined on the moon are processed and packaged in thin fibreglass bags
which are easily manufactured using lunar material. The bag itself is designed
to conform to the shape of the bucket so that the bucket will assume the stresses
during acceleration. By the time the payloads clear the Moon’s gravity, the
velocity will have been greatly reduced and they will be travelling more slowly.
It is at this point that the mass catcher intercepts the payloads. The payload’s
momentum carries it through the funnel-shaped catcher into a collector bag.
When this bag is full, it is removed and replaced with an empty one.
The mass catcher could easily
by located at the L4 point. This location has several clear advantages over
the more established mass catcher location of L2. Obviously, if our catcher
were to be located a L2, we would then have to transport the building materials
to the L4 construction site by conventional means. This not only increases costs
but also increases considerably the amount of time to get the material from
the lunar surface to the construction site. Due to the fact that the L4 and
L5 libration points are significantly more stable than L2, the issue of maintaining
position is not nearly as important.
The
catching device itself is fully automated. The catcher is in the form of a large
but light net which is manipulated by three cables to position the net anywhere
within an equilateral triangle.
 In
order to reduce costs wherever possible, the best rockets are obviously reusable
ones. Out of many bright ideas to achieve this two current methods, that will
undoubtedly multiply in the near future, seem to stand out. These are the Roton
Rotary Rocket and the Kistler Reusable Rocket. The single stage Roton Rocket
takes off vertically while its 7m diameter engine, consisting of 96 combustion
chambers into which oxidiser and fuel are fed, spins at 720rpm providing sufficient
centrifugal force for combustion pressure.
In
order to reduce costs wherever possible, the best rockets are obviously reusable
ones. Out of many bright ideas to achieve this two current methods, that will
undoubtedly multiply in the near future, seem to stand out. These are the Roton
Rotary Rocket and the Kistler Reusable Rocket. The single stage Roton Rocket
takes off vertically while its 7m diameter engine, consisting of 96 combustion
chambers into which oxidiser and fuel are fed, spins at 720rpm providing sufficient
centrifugal force for combustion pressure.